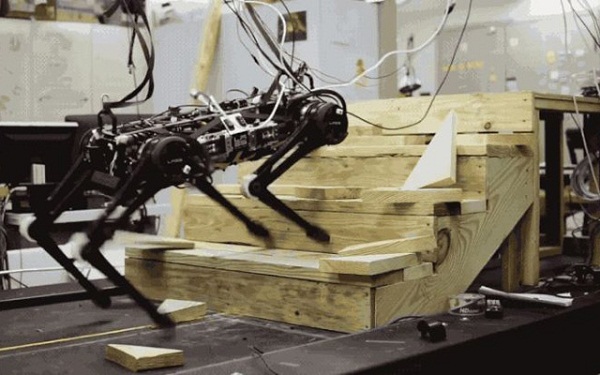
না দেখেই সিঁড়ি বেয়ে উঠতে পারে ম্যাসাচুসেটস ইনস্টিটিউট অফ টেকনোলজিস-এর রোবট ‘চিতা ৩’, প্রতিষ্ঠানের এক ভিডিও ফুটেজে এমনটাই দেখানো হয়েছে।ক্যামেরার সাহায্যে বাধা এড়িয়ে যাওয়ার পরিবর্তে নতুন অ্যালগরিদমের মাধ্যমে পরিবেশের স্পর্শ থেকেই দিক নির্দেশনা নিতে পারে ৯০ পাউন্ডের রোবটটি, বলা হয়েছে প্রযুক্তি সাইট ভার্জের প্রতিবেদনে।
এর আগেও অনেক রোবটকে সিঁড়ি বেয়ে উঠতে দেখা গেছে। বস্টন ডায়নামিকস-এর স্পটমিনি রোবটও সিঁড়িতে চড়তে পারে। কিন্তু স্পটমিনি’র পার্থক্য হচ্ছে এটি পথ দেখতে ক্যামেরা ব্যবহার করে ।
চিতা ৩-এর কারিগরদের উদ্দেশ্য ছিল পথ দেখানো ছাড়াই রোবটটি পরিচালনা করা। দৃষ্টি শক্তির ওপর বেশি নির্ভর করলে এর গতি কমতে পারে বা হোঁচট খেতে পারে। “যদি এটি এমন কোথাও পা রাখে যা ক্যামেরা দেখতে পায় না? এটি কী করবে?”- বলেন রোবটের নকশাকারী এমআইটির যন্ত্রপ্রকৌশল অধ্যাপক স্যাংবায়ে কিম। “এ ধরনের পরিস্থিতিতে সহায়ক হবে অন্ধের চালিকাশক্তি। আমরা আমাদের দৃষ্টি শক্তির ওপর খুব বেশি ভরসা করতে চাই না,” যোগ করেন কিম।
এমআইটির পক্ষ থেকে এক প্রেস বিজ্ঞপ্তিতে বলা হয়, তাদের পরিকল্পনা হলো রোবটটি এমন জায়গায় কাজে লাগানো যেখানে মানুষ পৌঁছাতে পারে না। যেমন, পাওয়ার প্লান্টের গভীরে পরীক্ষার জন্য এগুলো ব্যবহার করা যেতে পারে। “ঝুকিপূর্ণ, নোংরা এবং কঠিন কাজগুলো রিমোট নিয়ন্ত্রিত রোবট দিয়ে আরও নিরাপদে করা যেতে পারে,” বলেন কিম।
কিম আরও বলেন, এ ধরনের পরিবেশে রোবট হয়তো চোখে দেখতে পারবে না। এর আগে ফুকুশিমার বিধ্বস্ত দাইচি পারমাণবিক পাওয়ার প্লান্টে পারমাণবিক জ্বালানির অবশিষ্ট অংশ খুঁজতে একটি রোবট পাঠানো হলে বিকিরণের কারণে তার ক্যামেরা নষ্ট হয়ে যায়।
এ কারণে অ্যালগরিদম এবং সেন্সরের মাধ্যমে রোবটটিকে ধারণা দেওয়া হয়েছে তার দেহটি আসলে কোন অবস্থানে আছে। রোবটটির হার্ডওয়্যার আপগ্রেড করায় এটি এখন প্রসারিত ও মোচড় দিতে পারে বলে প্রতিবেদনে উল্লেখ করা হয়।